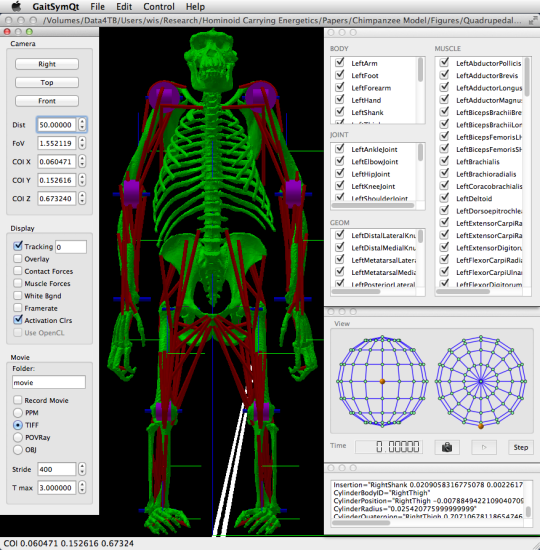
GaitSym é um programa de modelagem dinâmica para a frente. O que isto significa é que você especifique as forças e o programa usa as leis de Newton para calcular os movimentos. Você pode baixá-lo aqui, incluindo uma gama de modelos humanos e 2D não-humano e 3D para você começar. Ele usa o motor de física Motor Abertas Dynamics para fazer a maior parte do trabalho duro e oferece um sistema de formato de arquivo e exibição de modo que o usuário não tem que fazer qualquer programação. Ele também fornece vários modelos de músculo de modo a que as forças podem ser gerados directamente a partir de níveis de activação do músculo e um número de ganchos para permitir que ele seja usado com ferramentas de optimização global, tais como algoritmos genéticos. Suas principais características são: rápida, flexível e robusta Atacante dinâmico Modeller; Sophisticated Contato System; Minetti-Alexander e Umberger-Gerritsen-Martin Models musculares para Metabolic Estimativa de Custo; Via Pontos e Cylinder Embrulho para o músculo Caminhos; Tensor Inertial Calculado a partir Triangular Mesh Contorno; Mundial ou local Sistemas de Coordenadas para a criação do modelo eficiente. Fonte completo Código incluído (C ++ compila em MacOSX, Windows, Linux e outros sistemas Unix); Complete com uma variedade de modelos humanos e 2D não-humano e 3D; Produz Stills alta qualidade e animações via externa Ray-tracing
O que é novo nesta versão:.
- New joint controle deslizante
- Modelo muscular New incluindo tendão de amortecimento, cinética de ativação, a resposta não-linear da mola, e melhor estabilidade numérica
- condutores de automóveis nova caixa
- Nova caixa geom
- Alça muscular Novo que pode envolver em torno de dois cilindros paralelos
- Visualização nuvem de pontos Direto
- Abortar na dobradiça excessiva torques limite conjuntas, ou em limites alvo de dados
- A posição de monitoramento pode ser compensado para centralizar simulações monitorados
Comentários não encontrado